- 首页
- 定制软硬件解决方案
- 学习课程
-
创客教育产品
- 论坛
- 小R京东
- 小R淘宝
-
软件中心
-

小R安卓Android平台APP

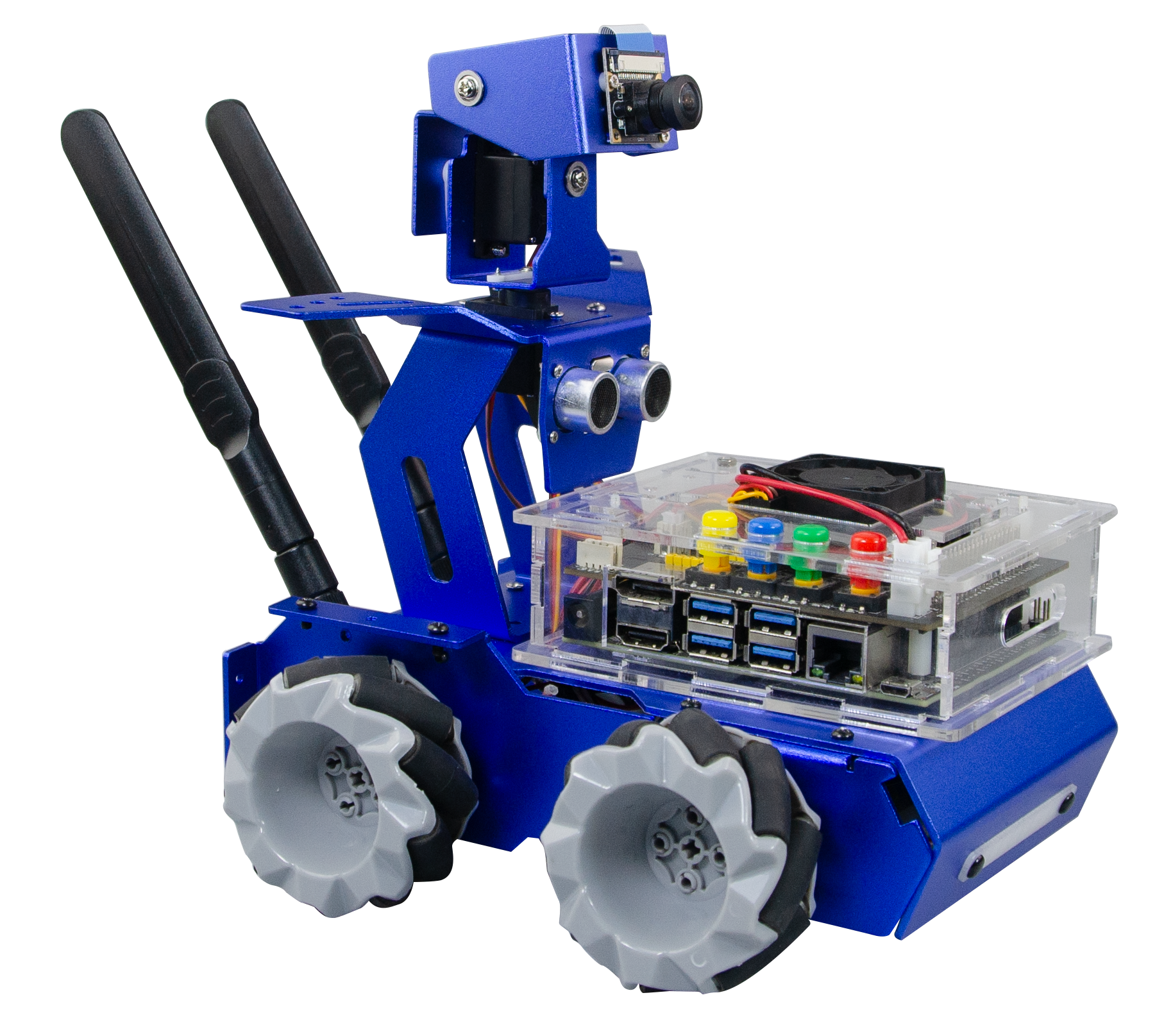
小R科技WiFi视频小车机器人安卓控制软件APP 本APP适用于小R科技所有常规的WiFi视频小车机器人产品,如DS/GFS/TH/平衡车/麦克纳姆轮车/X系列 等车型,具备马达、舵机控制,视频显示,重力感应VR等功能

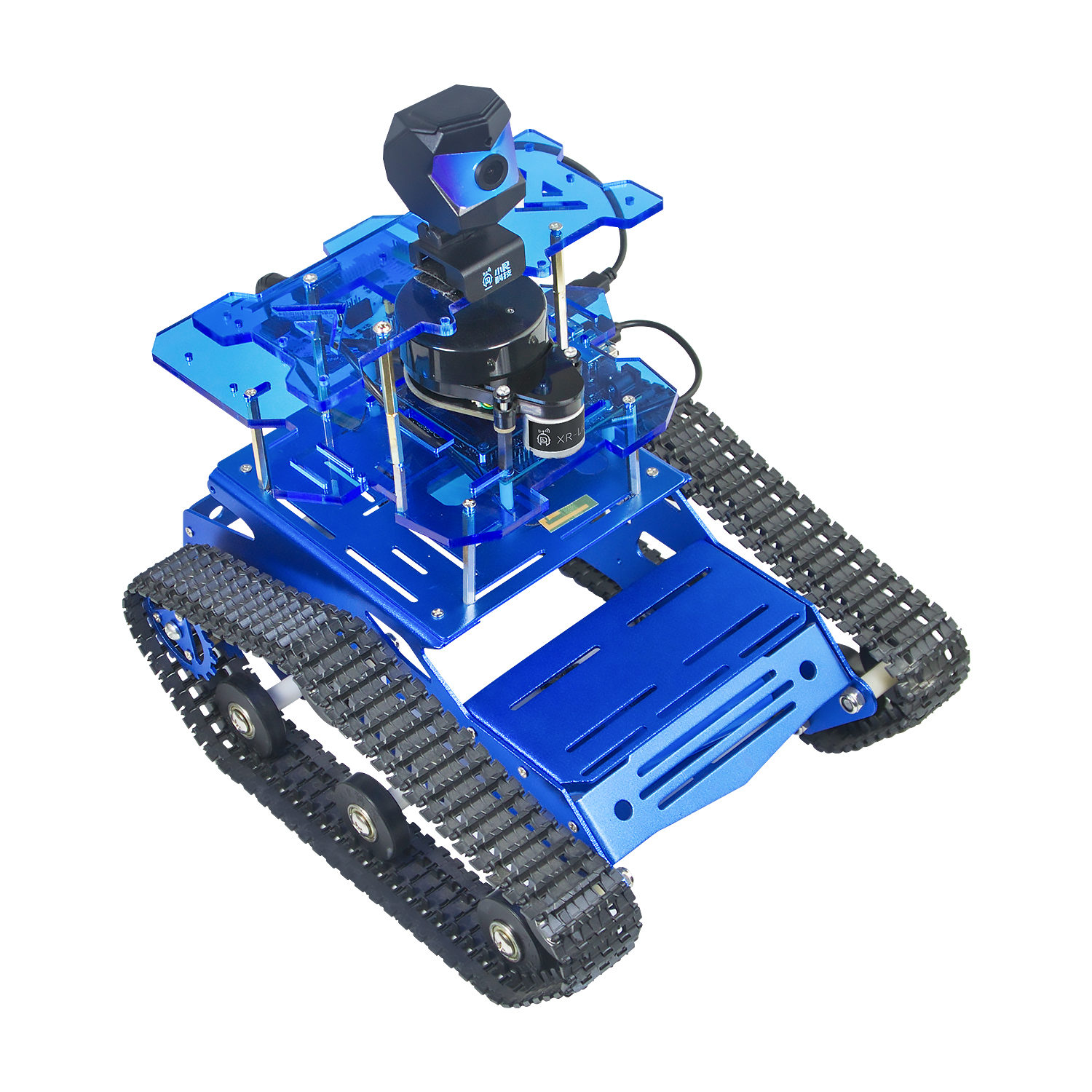
小R科技ROS-SLAM雷达导航机器人APP 本软件适用于安卓设备,配套小R科技开发的树莓派、Jetson Nano平台以及麦轮雷达车的ROS-SLAM激光雷达自主导航机器人产品,可实现在APP端遥控、建图、导航等功能。

小R科技全聚合机器人控制软件XR-Controller 小R科技全新一代智能小车机器人控制软件APP,适配小R科技X系列机器人、Jetbot、 DonkeyCar等智能小车机器人产品,集成了各种论坛帖子、在线学习课程、使用教程等资料,让玩家从体验到学习,从入门到精通,无障碍一条龙。
小R-Corgi四足仿生机器狗 小R科技通用系列安卓控制软件,可用于XR-Corgi四足仿生机械狗产品
小R科技DonkeyCar深度学习小车操控软件APP 本APP适用于小R科技的DonkeyCar深度学习自主巡线小车机器人,可在APP上实现深度学习小车的遥控、视频传送、数据采集、切换自动巡线模式,本APP支持安卓设备。本软件不再维护,请下载小R科技全聚合通用控制APP:XR-Controller
小R科技WuLi Bot瓦力与小飞机桌面型机器人控制软件安卓 APP 本APP运行于安卓平台,适用于WuLi Bot瓦力与小飞机桌面型机器人,软件集成了视频版、WiFi版两种不同套餐,请根据实际产品选择对应的入口。

小R科技Micro:bit机器人蓝牙遥控与图形化编程APP(安卓平台) 本APP运行于安卓设备,以蓝牙或WiFi的形式控制机器人,也可以通过图形化编程形式控制机器人动作,适用于小R的小蓝人、MiBit等基于Micro:bit核心的机器人产品。

ROS机器狗控制APP 小R科技ROS机器狗控制软件

小R科技MRT-Coren仿生人形机器人 APP 小R科技MRT-Coren仿生人形机器人控制软件APP,软件具体操控机器人、多种动作组、图形化编程、加载案例功能等 。 网盘密码:bg5m
-

小R苹果iOS平台APP

小R科技WiFi视频小车机器人控制软件iOS APP 本APP运行于苹果iOS平台,适用于小R科技所有常规的WiFi视频小车机器人,如DS/GFS/TH/平衡车/麦克纳姆轮车/X系列 等车型,下载后是一张二维码,请用微信或其他扫描二维码工具扫描后即可下载。
小R科技Micro:bit机器人蓝牙遥控与图形化编程APP(iOS平台) 本APP运行于iOS苹果手机、iPad设备,以蓝牙或WiFi的形式控制机器人,也可以通过图形化编程形式控制机器人动作,适用于小R的小蓝人、MiBit等基于Micro:bit核心的机器人产品。
小R科技WuLi Bot瓦力与小飞机桌面型机器人控制软件iOS APP 本APP运行于苹果iOS平台,适用于WuLi Bot瓦力与小飞机桌面型机器人,下载后是一张二维码,请用微信或其他扫描二维码工具扫描后即可下载。
仿生机器人ios控制软件XR-Controller 适用于小R科技仿生机器人系列(Corgi机器狗,仿生六足机器人)苹果端控制软件,扫码跳转应用商店安装
-

小R电脑PC平台软件

小R科技WiFi视频小车机器人PC控制软件V2.7 本软件适用于小R科技所有常规类型的WiFi视频小车机器人,软件运行在Windows系统电脑平台,如果MAC设备需要安装wine来兼容软件的运行。推荐使用管理员权限运行

XR Block图形化编程平台(Scratch3.0) XR Block是基于Scratch3.0开发的一款图形化编程软件;软件具有图形化编程、在线教程、在线加载案例功能等,兼容Arduino和Python;平台目前支持的产品有:Arduino传感器套件、WuLi Bot瓦力机器人、小蓝人机器人、MiBit小车、Arduino DS/TH小车。网盘密码: h8wi
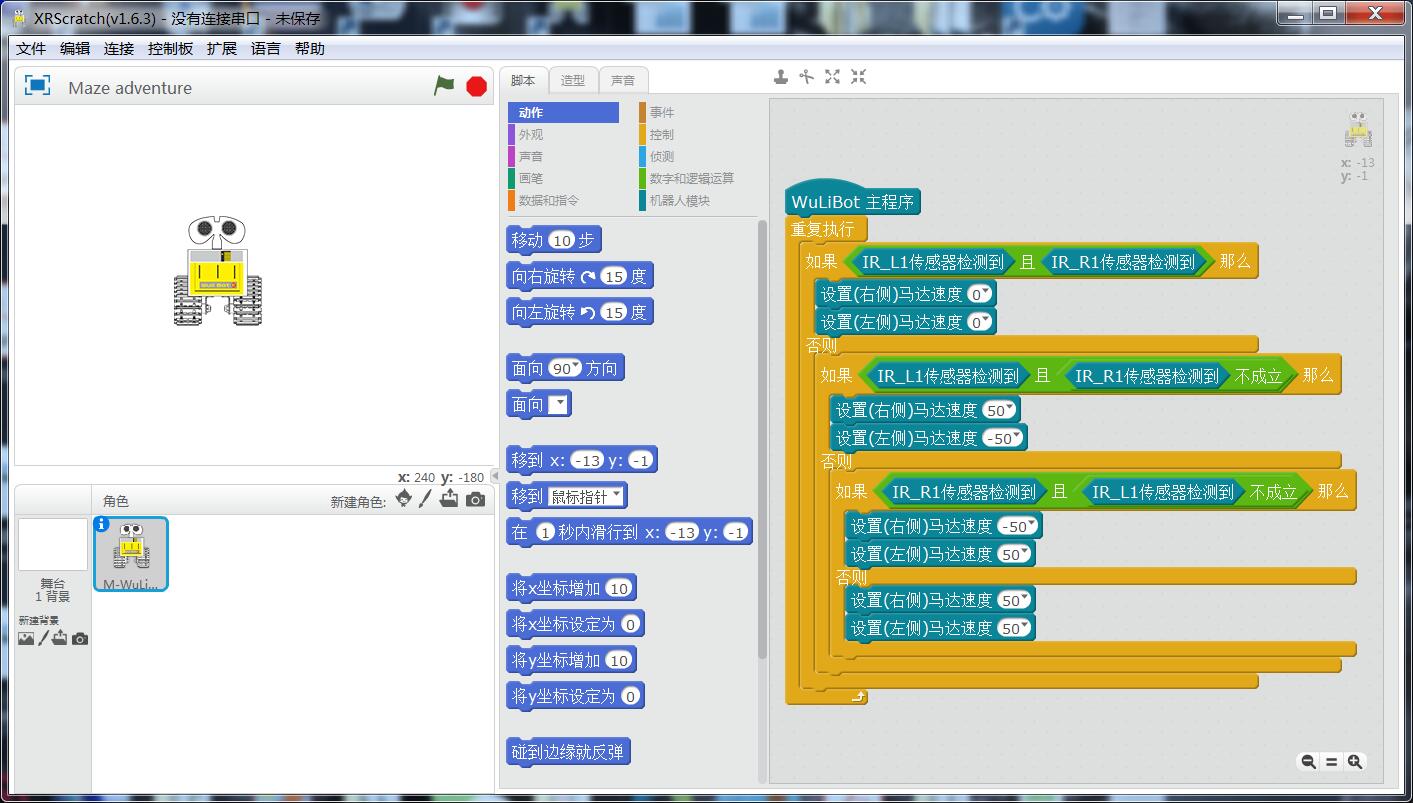
XR Scratch瓦力与小飞机图形化编程软件平台(已停止维护,请下载XR Block) XR Scratch图形化编程软件平台运行在PC电脑,基于Scratch公版开发,适用于小R的WuLi Bot小瓦力,小飞机等桌面型编程机器人,通过USB数据线下载生成的固件。

小R科技六足仿生机器人PC控制软件 本软件运行于Windows电脑平台,可通过WiFi连接小R科技旗下的Hexapod Mini / E1 / R1 /J1等机型的六足仿生机器人产品,使用本软件的电脑必须具备无线网卡,下载程序后,用解压软件解压,然后运行hexapod.exe。

AI六自由度机械臂控制软件 小R科技AI六自由度控制PC软件,可以使用该软件进行动作编程以及进行颜色识别、人脸识别等高级AI功能
-

小R机器人开发编程软件

Arduino程序开发软件Arduino IDE 1.7.8 Arduino IDE是一款专门针对Arduino硬件的程序开发工具,支持ISP在线烧写程序,小R科技旗下所有Arduino机器人小车都可以使用这款软件进行程序编写、编译和下载。 软件提取码:gxqn

STM32单片机程序开发软件IAR IAR用于STM32系列单片机的代码编写和编译开发,适用于小R科技所有STM32核心的机器人小车。软件提取码:th2n

51单片机程序开发软件Keil 4 Keil C51是美国Keil Software公司出品的51系列兼容单片机C语言软件开发系统,可用于开发小R科技的51duino系列机器人小车驱动程序。

STM32单片机程序下载软件Flash loader V2.6 Flash loader用于把IAR生成的Hex固件烧录到STM32单片机,适用于小R科技旗下所有STM32平台机器人小车。

51单片机程序固件下载程序STC-ISP STC-ISP 是一款单片机下载编程烧录软件,是针对STC系列单片机而设计的,可下载STC旗下系列51单片机Hex固件。
-

小R微信小程序

小R科技蓝牙小程序机器人控制 本应用是运行于微信上的小程序,下载后是一张二维码,请使用微信扫描二维码即可激活,小程序可以通过蓝牙控制小R科技旗下所有具备蓝牙功能的机器人小车,例如51/STM32/Arduino/FPGA/树莓派/Micro:bit等平台。
-

其他应用工具软件

SSCOM串口助手软件 SSCOM是一个很好用的串口助手软件,它可以正确识别和收发大部分板子的串口数据,并可以很方便地进行刷机命令发送操作。

Putty远程命令执行工具 PuTTY是一个Telnet、SSH、TCP以及串行接口连接软件,我们一般用其SSH与Linux系统进行命令交互,相当于Linux系统的命令行Shell,这个软件可以很方便地连接小R科技的树莓派、Jetson Nano平台系统。

USR-TCP-TEST网口助手软件 USR-TCP-TEST网口助手软件可以构建一个TCP Client/TCP Server/UDP环境,非常方便地实现网络数据的收发测试。

WinSCP文件传输软件 WinSCP是一个支持SSH的SCP文件传输软件,它可以连接Linux系统板子,很方便地像Windows资源管理器窗口一样实现与Linux系统的文件传送,比如:当你希望给树莓派或Jetson Nano传送文件时,就可以用这个工具实现。

51单片机定时器初值计算程序 用于计算51单片机定时器初始值。

TFTPD32刷机工具软件 TFTPD32软件用于构建一个简易的TFTP文件协议服务器,可以配合串口烧录命令,把Linux固件通过网线发送到Linux系统板子上,然后再固化刷入Flash,这是嵌入式Linux系统常用的烧录方式。
-
- 联系我们
- 产品定制